
VN 9.002 Complex signal in CAN data bus
In normal transmission mode, data packets have the following block configurations (frames) (see fig. VN 9.002).
The message data block is used to transmit messages on the CAN data bus (e.g. coolant temperature).
The request data block is used to request messages on the CAN data bus from another control unit.
The error data block serves to notify all connected control units that an error has occurred and the last message on the CAN data bus is invalid.
The CAN data bus protocol supports two different CAN data bus message frame formats that differ only in the length of the identifier:
- standard format;
- extended format.
DaimlerChrysler currently only uses the standard format
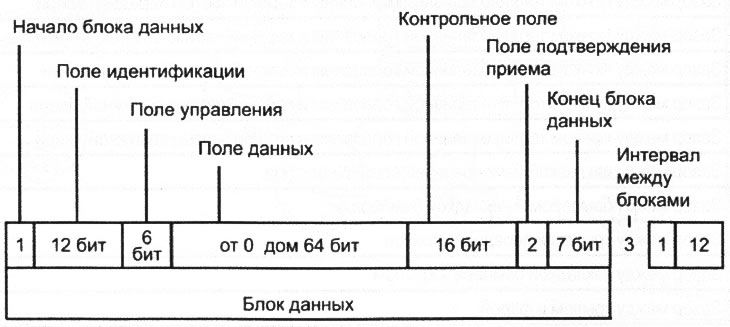
The data packet for transmitting messages on the CAN data bus consists of seven consecutive fields.
- Start of data block: marks the beginning of the message (start bit) and synchronizes all modules.
- Identification field: This field consists of an identifier (address identifier) in 11 bits, 1 check bit and request) (Remote Transmission Request-Bit). This control bit marks the packet as a Data Frame (message data block) or as Remote Frame (request data block) without the actual message.
- Control field: (6 bit) contains IDE (control bits) bit (Identifier Extension Bit) for standard and extended format recognition, a spare bit for subsequent extensions and - in the last 4 bits - the number of data bytes embedded in the data field.
- Data field: can contain from 0 to 8 bytes (0 to 64 bits) data. A message on the CAN data bus with a length of 0 bytes is used to synchronize distributed processes.
- Control field: CRC (Cyclic-Redundancy-Check Field) contains 16 bits and serves for control recognition of errors during transmission.
- ACK confirmation field
- (Acknowledgement Field) contains a confirmation signal from the receiver units about the receipt of error-free messages via the CAN data bus
- End of Data Block: Marks the end of a data packet.
- Block interval: separates blocks of data in time and must contain at least 3 bits. After that, any control unit can transmit the next data packet.
- Idle state: if no control unit sends messages (rest mode), the CAN data bus remains idle until the next data packet is transmitted.