
A CAN·multiplex hálózat működési elve
Egyedi elektromos és elektronikus készülékek korábban használt kábelcsatlakozása (szabványos kábelcsatlakozás) minden egyes vezérlőegység közvetlen összeköttetését okozza minden olyan érzékelővel és aktuátorral, amelytől az egység mért értékeket kapott, vagy amelyeket vezérelt. Bizonyos körülmények között ez túlzott hosszúsághoz vagy a kábelvonalak megkettőzéséhez vezethet. A szabványos kábelezéshez képest az adatbusz a következő előnyöket kínálja.
1. Az érzékelők vezetékeit csak a legközelebbi vezérlőegységhez szabad elvezetni, amely a mért értékeket adatcsomaggá alakítja és továbbítja a CAN adatbuszra.
Ebben az esetben egy másik vezérlőegység vezérelheti a szervo mechanizmust, amely a CAN adatbuszon keresztül kapja a megfelelő adatcsomagot, és ez alapján kiszámítja a szervo mechanizmuson végrehajtott vezérlési művelet értékét.
2. Egy érzékelő jelei (például a hűtőfolyadék hőmérséklet érzékelőjétől) különböző rendszerek használhatják.
3. Diagnosztikai képességek fejlesztése. Mivel egy érzékelőtől érkező jelek (pl sebességjelző) különböző rendszerek használják, akkor ha minden ezt a jelet használó rendszer hibaüzenetet ad ki, akkor általában a jeleit feldolgozó érzékelő vagy vezérlőegység hibás. Ha csak egy rendszertől érkezik hibaüzenet, bár ezt a jelet más rendszerek is használják, akkor a hiba okát leggyakrabban a feldolgozó vezérlőegység vagy aktuátor tartalmazza.
4. Nagy adatsebesség 1Mbps-ig max, vonalhossz 40m (jelenleg nem használják Mercedes Benz járműveken). Az adatátviteli sebesség egy Mercedes Benz járművön 83 Kbps és 500 Kbps között van.
5. Egy vonalon több üzenet is továbbítható egymás után.
Az alábbi ábrákon a multiplex hálózat blokkvázlata és a multiplex hálózat komplex jelében lévő információeloszlás diagramja látható.
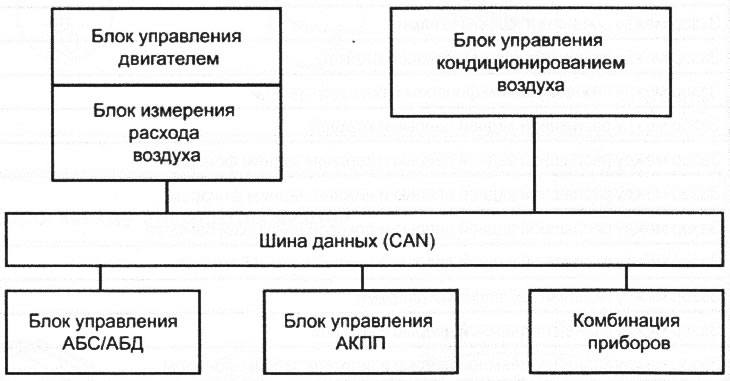
VN 9.001 Egy multiplex példaértékű blokkdiagramja (CAN) hálózatok