
Аутобуска комуникација CAN
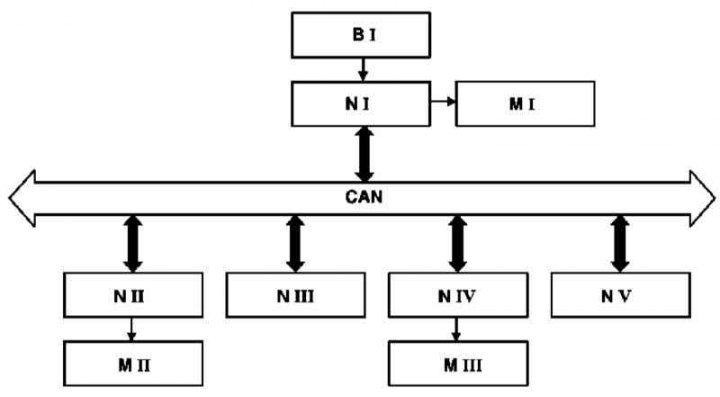
Б - Сензор 1
CAN - Сабирница података
М - Извршни елементи I-III (серво механизми)
Н - Контролне јединице (контролори) I-V
Аутобус је пун дуплекс (или само дуплекс), тј. било који уређај повезан на њега може истовремено да прима и преноси поруке.
Сигнал са осетљивог елемента одговарајуће информације (сензор) улази у најближу контролну јединицу, која га обрађује и преноси на магистралу података CAN.
Било која контролна јединица повезана на магистралу података CAN, може очитати овај сигнал, израчунати параметре контролног дејства на основу њега и контролисати серво актуатора.
Предности
Уобичајеним кабловским повезивањем електричних и електронских уређаја, свака управљачка јединица је директно повезана са свим сензорима и актуаторима од којих прима мерења или којима управља.
Компликација контролног система доводи до превелике дужине или више кабловских водова.
У поређењу са стандардним кабловима, магистрала података пружа:
- Смањење броја каблова. Жице од сензора се повлаче само до најближе контролне јединице, која конвертује измерене вредности у пакет података и преноси га на магистралу CAN;
- Актуатором може управљати било која контролна јединица која преко магистрале CAN прима одговарајући пакет података, и на основу њега израчунава вредност контролног дејства на сервомеханизам;
- Побољшање електромагнетне компатибилности;
- Смањење броја утичних прикључака и смањење броја контактних излаза на управљачким јединицама;
- Губитак тежине;
- Смањење броја сензора, јер сигнали појединачних сензора (на пример из сензора температуре расхладне течности) могу користити различити системи;
- Побољшање дијагностичких могућности. Јер сигнали појединачних сензора (на пример сигнал брзине) користе различити системи, онда ако сви системи који користе овај сигнал издају поруку о грешци, сензор или контролна јединица која обрађује своје сигнале је обично неисправна. Ако порука о грешци долази само из једног система, иако овај сигнал користе други системи, онда је узрок квара најчешће у управљачкој јединици обраде или сервомеханизму;
- Висока брзина преноса података - могућа до 1 Мбит/с са максималном дужином линије од 40 м. Тренутно на возилима Mercedes-Benz брзина преноса података је од 83 Кбпс до 500 Кбпс;
- Неколико порука се може пренети наизмјенично на истој линији.
Сабирница података CAN састоји се од двожичне жице направљене у облику упреденог пара. Сви уређаји повезани на ову линију (контролне јединице уређаја).
Пренос података се врши дуплирањем на обе жице, а логички нивои магистрале података се пресликавају (односно ако се на једној жици преноси логички нулти ниво (0), затим на другој жици - ниво логичке јединице (1), и обрнуто).
Двожична шема преноса се користи из два разлога: за контролу грешака и као основа за поузданост.
Ако дође до вршног напона само на једној жици, на пример због ЕМЦ проблема (ЕМЦ), онда пријемници могу да идентификују ово као грешку и игноришу овај скок.
У случају кратког споја или прекида једне од две жице сабирнице CAN, захваљујући интегрисаном софтверском и хардверском систему поузданости, врши се прелазак на једножични режим рада. Оштећени далековод се више не користи.
Редослед и формат који корисници преносе и примају (претплатника) поруке је дефинисан у комуникационом протоколу.
Основна карактеристика магистрале података CAN у поређењу са другим системима магистрале заснованим на принципу адресирања претплатника је адресирање везано за поруке.
То значи да се свакој поруци која се преноси на магистрали додељује њена стална адреса (идентификатор), означавајући садржај ове поруке (на пример: температура расхладне течности). Протокол магистрале података CAN омогућава пренос до 2048 различитих порука, при чему су адресе од 2033 до 2048 трајно додељене.
Количина података у једној поруци на магистрали CAN је 8 бајтова.
Пријемна јединица обрађује само оне поруке које су ускладиштене у сопственој идентификационој листи (контрола прихватања).
Пакети података могу да се преносе само ако је размена магистрала CAN бесплатно (тј. ако након преноса последњег пакета уследи интервал од 3 бита, а ниједна контролна јединица не почне да преноси следећу поруку). У овом случају, логички ниво магистрале података мора бити рецесиван (логичан «1»).
Ако више управљачких јединица почне да емитује поруке у исто време, тада ступа на снагу принцип приоритета, према којем ће се порука са највећим приоритетом пренети прва без губљења времена или битова (арбитражу захтева за приступ заједничкој магистрали података).
Свака контролна јединица која изгуби право арбитраже аутоматски ће се пребацити на пријем и поново покушати да пошаље своју поруку чим се магистрала података поново ослободи.
Поред пакета података користе се и пакети за тражење одређене поруке на магистрали података CAN, - контролна јединица која може да пружи тражену информацију одговара на такав захтев.
Формат преноса података
У нормалном режиму преноса користе се пакети следећих конфигурација:
- Data Frame (оквир поруке) за пренос порука на магистрали података CAN (на пример: температура расхладне течности);
- Remote Frame (оквир захтева) да захтевају поруке на магистрали података CAN са друге контролне јединице;
- Error Frame (оквир грешке), - све повезане контролне јединице су обавештене да је дошло до грешке и последња порука на магистрали података CAN је неважећи.
Протокол магистрале података CAN подржава два различита формата оквира порука на магистрали података CAN, који се разликују само по дужини идентификатора:
- стандардни формат;
- Проширени формат.
Тренутно у системима за размену података система управљања аутомобилима компаније Daimler Chrysler користи се само стандардни формат.
Сваки оквир се преноси на магистралу CAN поруке се састоје од седам узастопних поља:
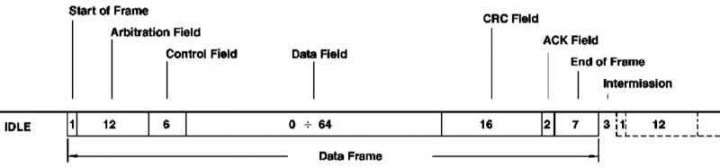
Формат оквира
- Start of Frame (старт бит): Означава почетак поруке и синхронизује све модуле;
- Arbitration Field (ИД и захтев): Ово поље се састоји од идентификатора (адресе) 11 битова и 1 бит за проверу (Remote Transmission Request-Bit). Овај бит за проверу означава оквир као Data Frame (оквир података) или како Remote Frame (даљински оквир захтева) без бајтова података;
- Control Field (контролни битови): Контролно поље (6 бит) садржи IDE-мало (Identifier Extension Bit) за препознавање стандардног и проширеног формата, резервни бит за накнадна проширења и - у последња 4 бита - број бајтова података уграђених у Data Field (поље података);
- Data Field (података): Поље података може садржати од 0 до 8 бајтова података; порука сабирнице података CAN дужина 0 бајтова се користи за синхронизацију дистрибуираних процеса;
- CRC Field (контролно поље): Фиелд CRC (Cyclic-Redundancy-Check Field) садржи 16 бита и служи за контролно препознавање грешака при преносу;
- ACK Field (потврда о пријему): Фиелд ACK (Acknowledgement Field) садржи сигнал потврде свих пријемних јединица које су примиле поруку на магистрали CAN нема грешака;
- End of Frame (крај оквира): Означава крај оквира;
- Intermission (интервал): Интервал између два оквира података. Интервал мора бити најмање 3 бита. Након тога, било која контролна јединица може започети пренос следећег пакета;
- IDLE (режим одмора): Ако ниједна контролна јединица не шаље поруке, онда сабирница CAN остаје у режиму мировања док се не пренесе следећи пакет.
Приоритети
Да би се подаци обрађивали у реалном времену, мора бити омогућено њихово брзо преношење.
Ово подразумева не само присуство линије са високом физичком брзином преноса података, већ захтева и брзо обезбеђивање приступа заједничкој магистрали CAN, ако више контролних јединица треба да шаље поруке истовремено.
Да би се разликовали подаци који се преносе преко магистрале CAN поруке према степену хитности, за појединачне поруке су предвиђени различити приоритети.
Време паљења, на пример, има највећи приоритет, вредности клизања имају средњи, а спољна температура има најнижи приоритет.
Приоритет са којим се порука преноси на магистралу CAN, дефинисан идентификатором (адреса) одговарајућу поруку.
Идентификатор који одговара мањем бинарном броју има већи приоритет, и обрнуто.
Протокол магистрале података CAN заснива се на два логичка стања: Битови су или «рецесиван» (логичан «1»), или «доминантан» (логичан «0»). Ако доминантни бит преноси најмање један модул, онда се рецесивни битови које преносе други модули преписују.
Пример
Ако више контролних јединица започне пренос података у исто време, онда се конфликт приступа заједничкој магистрали података решава тако што «битна арбитража захтева за дељеним ресурсима» са одговарајућим идентификаторима.
Приликом преноса поља идентификатора, предајник после сваког бита проверава да ли још увек има право на пренос, или да ли друга контролна јединица већ преноси поруку са већим приоритетом на магистрали.
Ако је рецесивни бит који преноси прва јединица предајника замењен доминантним битом друге предајне јединице, тада прва јединица предајника губи право на пренос (арбитража) и постаје блок пријемника.
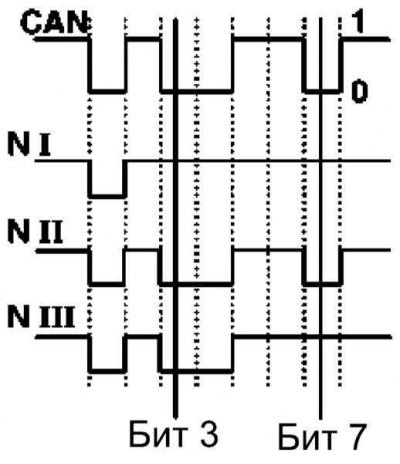
Пример арбитраже
Прва контролна јединица (N I) губи арбитражу од 3. бит.
Трећа контролна јединица (N III) губи арбитражу од 7. бит.
Друга контролна јединица (N II) задржава право приступа магистрали података CAN и може послати своју поруку.
Друге контролне јединице ће покушати да пошаљу своје поруке на магистралу података CAN тек пошто је поново ослобођена. У овом случају, право на пренос ће поново бити додељено у складу са приоритетом поруке на магистрали података CAN.
Препознавање грешке
Сметње могу довести до грешака у преносу података. Такве грешке у преносу треба препознати и исправити. Протокол магистрале података CAN разликује два нивоа препознавања грешке:
- Механизми на нивоу Data Frame (оквир података);
- Механизми нивоа бита.
Механизми на нивоу Data Frame
Cyclic-Redundancy-Check
На основу података пренетих преко магистрале CAN предајник блока порука израчунава контролне битове који се преносе заједно са пакетом података у пољу «CRC Field» (контролне суме). Јединица пријемника поново израчунава ове контролне битове на основу података примљених на магистрали CAN поруку и упоређује их са контролним битовима примљеним са поруком.
Frame Check
Овај механизам проверава структуру пренетог блока (Рам), односно поново се проверавају битна поља са датим фиксним форматом и дужином оквира.
Препознати по функцији Frame Check грешке су означене као грешке формата.
Механизми нивоа бита
Мониторинг
Сваки модул приликом преноса поруке прати логички ниво магистрале података CAN и одређује разлике између пренетих и примљених битова. Ово осигурава поуздано препознавање глобалних и локалних грешака битова које се јављају у јединици предајника.
Bit Stuffing
У сваком оквиру података између поља «Start of Frame» и крај поља «CRC Field» не би требало да постоји више од 5 узастопних битова са истим поларитетом.
После сваке секвенце од 5 идентичних битова, блок предајник додаје један бит са супротним поларитетом у ток битова.
Блокови пријемника бришу ове битове након што приме поруку на магистрали података CAN.
Решавање проблема
Ако било који модул сабирнице података CAN препозна грешку, прекида пренос података који је у току слањем поруке о грешци. Порука о грешци се састоји од 6 доминантних битова.
Захваљујући поруци о грешци, све је повезано на магистралу података CAN контролне јединице се обавештавају о локалној грешци која се догодила и сходно томе игноришу претходно послату поруку.
Након кратке паузе, све контролне јединице ће поново моћи да шаљу поруке преко сабирнице података CAN, при чему се порука са највишим приоритетом поново шаље прва.
Управљачка јединица чија порука на магистрали података CAN проузроковао грешку, такође почиње да поново емитује своју поруку (функција Automatic Repeat Request).
Типови гума CAN
За различите области управљања користе се различите сабирнице CAN. Они се међусобно разликују по брзини преноса података.
Брзина преноса магистрале података CAN области «мотор и ходни део» (CAN-C) је 125 Кбпс, а магистрала података CAN «Салон» (CAN-B) због мањег броја посебно хитних порука, пројектован је за брзину преноса података од само 83 Кбпс.
Размена података између два система магистрала одвија се преко тзв «капије», тј. контролне јединице повезане на обе магистрале података.
оптичка магистрала D2B (Digital Daten-Bus) подаци примењени на област «Аудио/Комуникација/Навигација». Оптички кабл може пренети знатно већу количину информација од магистрале са бакарним каблом.
CAN Ц - гума «Мотор и шасија»
Такозвани завршни отпорник магистрале података са отпором од 120 Ω инсталиран је са сваке стране терминалне контролне јединице и повезан је између обе жице сабирнице података.
Сабирница података CAN моторни простор се активира само када је контакт укључен.
До аутобуса CAN-На Ц се може повезати више од 7 контролних јединица.
CAN-B - гума «Салон»
Неке контролне јединице повезане на магистралу података CAN унутрашњост, се активирају без обзира на паљење (на пример систем са једним закључавањем).
Дакле, магистрала података CAN кабина мора бити у оперативној приправности и када је контакт искључен, што значи да се мора обезбедити могућност преноса пакета података и када је контакт искључен.
Да би се што више смањила потрошња струје мировања, магистрала података CAN, у недостатку података неопходних за пренос, прелази у пасивни режим чекања и поново се активира тек следећи пут када му се приступи.
Ако је у пасивном режиму приправности магистрале података CAN кабина било која контролна јединица (на пример управљачки модул са једном бравом) преко њега преноси поруку, онда је прима само главни системски модул (електронски прекидач за паљење, EZS/EIS). Модул EZS чува ову поруку у меморији и шаље сигнал за активирање (Wake-up) на све управљачке јединице повезане на магистралу CAN-ИН.
Када се активира, EZS проверава постојање свих корисника магистрале података CAN, након чега преноси претходно сачувану поруку у меморији.
До аутобуса CAN-Може се повезати више од 20 контролних јединица.