
CAN rad
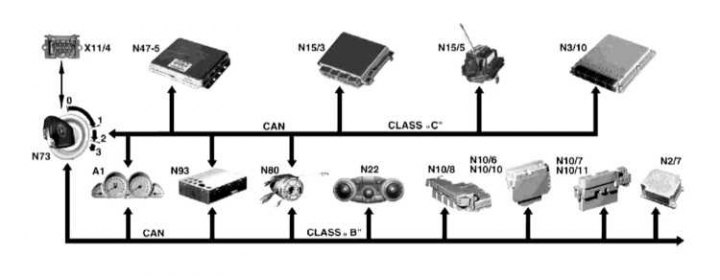
A1 - Nadzorna ploča; CAN B - CAN sabirnica podataka. Salon; CAN C - CAN sabirnica podataka. Motor i vozni mehanizam; N2 / 7 - Upravljačka jedinica za sustave samodijagnostike; N3/10 - Upravljačka jedinica motora; N10/6 - Lijevi prednji SAM; N10/7 - Desni prednji SAM; N10/8 - Stražnji SAM; N15/3 - ETC upravljačka jedinica; N15/5 - upravljačka jedinica ručice mjenjača AT; N22 - upravljačka jedinica gumba KLA; N47-5 - upravljačka jedinica ESP, SPS i BAS; N73 - EIS upravljačka jedinica; N80 - Blok stupa upravljača; N93 - Centralna ulazna upravljačka jedinica; X11/4 - Dijagnostička utičnica
CAN komunikacija
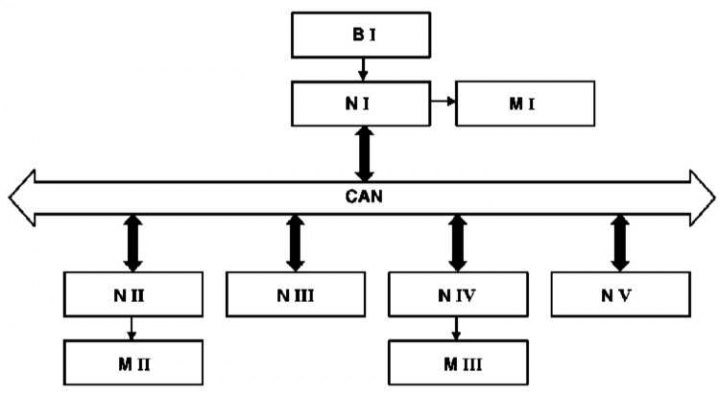
B - Senzor 1; CAN - Podatkovna sabirnica; M - Izvršni elementi I - III (servo mehanizmi); N - Kontrolne jedinice (kontrolori) I - V
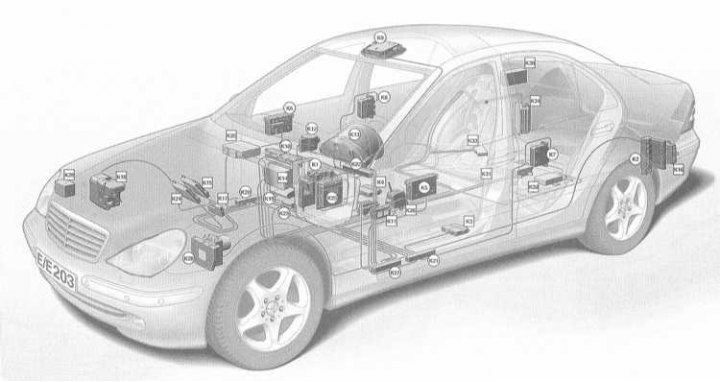
Elementi podatkovne mreže (CAN)
CAN B (Salon)
K1 - Prednja registracijska i upravljačka jedinica s kutijom s osiguračima i relejima (SAM/SRB-V); K2 - Stražnja jedinica za registraciju i upravljanje s kutijom s osiguračima i relejima (SAM/SRB-H); K3 - Upravljačka jedinica lijevog sjedala (SSG); K4 - Upravljačka jedinica desnog sjedala (SSG); K5 - Upravljačka jedinica prednjih lijevih vrata (TSG); K6 - Upravljačka jedinica prednjih desnih vrata (TSG); K7 - Upravljačka jedinica stražnjih lijevih vrata (TSG); K8 - Upravljačka jedinica stražnjih desnih vrata (TSG); K9 - Krovna upravljačka jedinica (DBE); K10 - Gornje kontrolno polje (OBF); K11 - Donje kontrolno polje (UBF); K12 - Prekidač za pokretanje elektroničkog paljenja (EZS); K13 - Nadzorna ploča (KI); K14 - Sustav COMMAND / audio 10 / audio 30 / audio 30 APS; K15 - Parktronic sustav (PTS); K16 - Uređaj za spajanje prikolice (AAG); K17 - Višenamjenska upravljačka jedinica za posebne modele (MSS); K18 - Parking grijanje; K19 - Grijač (KKLA/BKLA – SA); K20 - Razdjelnik CAN-B RBA desno; K21 - Razdjelnik CAN-B RBA lijevo; K22 - Konzola razdjelnika CAN-B; K23 - Zračni jastuci s ugrađenim ARMINCA pozivnim sustavom
MOŽE C (Pogon i vozni mehanizam)
K12 - Prekidač paljenja (EZS); K13 - Nadzorna ploča (KI); K24 - Elektronička kontrola mjenjača (EGS ili KGS); K25 - Upravljačka jedinica motora (MSG); K26 - Elektronički mjenjač (EMW); K27 - Razdjelnik CAN Class-C RBA lijevo; K28 - Elektronički sustav protiv proklizavanja (ESP)
Neumreženi SG-ovi
K29 - Automatska kontrola dometa (ALWR)
K30 - TV tuner
Elementi spojeni na optičku D2B sabirnicu
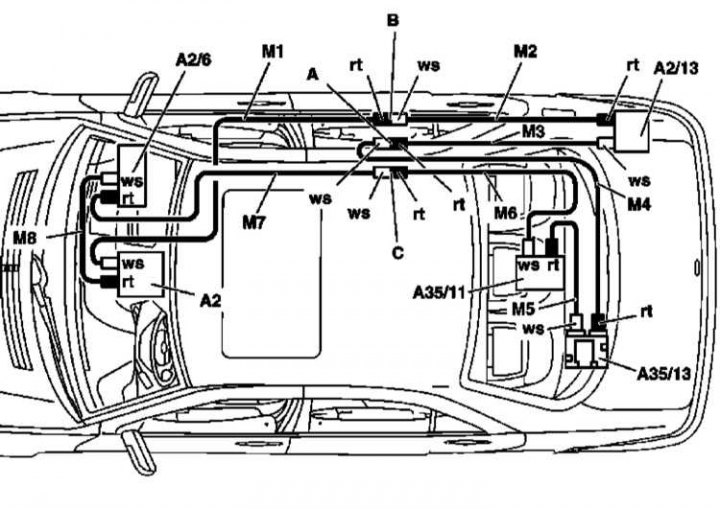
D2B — (Audio/Komunikacija/Navigacija)
Optički kabel
K14 - KOMANDA / audio 10 / audio 30 / audio 30 APS; K31 - Telefonski sustav (MINNA hitni poziv); K32 - Linguatronic uređaj za glasovnu kontrolu (SBS); K33 - Kontroler za mobilni telefon (sučelje); K34 - Pojačalo zvuka; K35 - CD izmjenjivač
Nisu svi prikazani
A2 - Radio prijemnik ili magnetofon; A2/6 - CD izmjenjivač; A40/3 - Displej i upravljačka jedinica za rad sustava COMAND; A2/13 - Pojačalo zvuka; A35/11 - Upravljačka jedinica sustava glasovnog upravljanja; A59/1 - D2B sučelje za mobilni/ugrađeni telefon; A35 - Primopredajnik za mobitel (CTEL) / TELE AID sustavi hitnih poziva; A35/8 - TELE AID upravljačka jedinica; A, B, C - Veze; M1 - Svjetlovodni kabel 1; M2 - Kabel od optičkih vlakana 2; M3 - Svjetlovodni kabel 3; M4 - Svjetlovodni kabel 4; M5 - Svjetlovodni kabel 5; M6 - Svjetlovodni kabel 6; M7 - Svjetlovodni kabel 7; ws - bijeli umetak
OC

Od
Osnovne informacije
Vozilo koristi nekoliko CAN sabirnica (Controller Area Network) između blokova (moduli) upravljanje raznim sustavima i upravljačima izvršnih uređaja automobila.
Pojedinačne upravljačke jedinice su međusobno umrežene i mogu razmjenjivati podatke.
Autobus je dvosmjeran, tj. bilo koji uređaj spojen na njega može primati i slati poruke.
Signal senzora (senzor) ulazi u najbližu upravljačku jedinicu koja ga obrađuje i prenosi na CAN sabirnicu podataka.
Bilo koja kontrolna jedinica spojena na CAN sabirnicu podataka može očitati ovaj signal, izračunati vrijednost kontrolne akcije na temelju njega i upravljati servo aktuatorom.
Prednosti
Uz uobičajenu kabelsku vezu električnih i elektroničkih uređaja, svaka upravljačka jedinica izravno je povezana sa svim senzorima i aktuatorima od kojih prima mjerenja ili kojima upravlja.
Komplikacija sustava upravljanja dovodi do prekomjerne duljine ili više kabelskih linija.
U usporedbi sa standardnim kablovima, podatkovna sabirnica pruža:
- Smanjenje broja kablova. Žice od senzora povlače se samo do najbliže upravljačke jedinice, koja izmjerene vrijednosti pretvara u paket podataka i prenosi na CAN sabirnicu.
- Bilo koja upravljačka jedinica može upravljati aktuatorom koji preko CAN sabirnice prima odgovarajući paket podataka i na temelju toga izračunava vrijednost upravljačkog djelovanja na servomehanizam.
- Poboljšana elektromagnetska kompatibilnost.
- Smanjenje broja utičnih spojeva i smanjenje broja kontaktnih izlaza na upravljačkim jedinicama.
- Gubitak težine.
- Smanjenje broja senzora, jer signali jednog senzora (npr. od osjetnika temperature rashladne tekućine) mogu koristiti različiti sustavi.
- Poboljšanje dijagnostičkih mogućnosti. Jer signali jednog senzora (npr. signal za brzinu) koriste različiti sustavi, onda ako poruku o pogrešci izdaju svi sustavi koji koriste ovaj signal, senzor ili upravljačka jedinica koja obrađuje njihove signale obično je neispravna. Ako poruka o grešci dolazi samo iz jednog sustava, iako taj signal koriste i drugi sustavi, tada je uzrok kvara najčešće u upravljačkoj jedinici obrade ili servomehanizmu.
- Visoka brzina prijenosa podataka - moguće je do 1 Mbit/s uz maksimalnu duljinu linije od 40 m. Vozila Mercedes-Benz trenutno imaju brzine prijenosa podataka između 83 Kbit/s i 500 Kbit/s.
- Nekoliko poruka može se slati naizmjenično na istoj liniji.
CAN sabirnica podataka sastoji se od dvožilne žice izrađene u obliku upletene parice. Svi uređaji spojeni na ovu liniju (upravljačke jedinice uređaja).
Prijenos podataka provodi se dupliciranjem na obje žice, a logičke razine sabirnice podataka se zrcale (odnosno ako se jednom žicom prenosi razina logičke nule (0), tada se razina logičke jedinice prenosi drugom žicom (1), i obrnuto).
Dvožična shema prijenosa koristi se iz dva razloga: za otkrivanje grešaka i kao osnova za pouzdanost.
Ako se vrh napona javlja samo na jednoj žici (npr. zbog problema s elektromagnetskom kompatibilnošću (elektromagnetska kompatibilnost)), prijamne jedinice to mogu prepoznati kao pogrešku i ignorirati ovaj skok napona.
Ako dođe do kratkog spoja ili prekida jedne od dvije žice CAN podatkovne sabirnice, tada će se zahvaljujući integriranom hardverskom i softverskom sustavu pouzdanosti prebaciti na jednožilni način rada. Oštećeni dalekovod neće se koristiti.
Redoslijed i format koji korisnici prenose i primaju (pretplatnika) poruke definiran je u komunikacijskom protokolu.
Značajna značajka razlikovanja CAN podatkovne sabirnice u usporedbi s drugim sustavima sabirnica koji se temelje na principu adresiranja pretplatnika je adresiranje vezano uz poruke.
To znači da je svakoj poruci na CAN sabirnici podataka dodijeljena stalna adresa (identifikator), označavajući sadržaj ove poruke (npr.: temperatura rashladne tekućine). Protokol CAN podatkovne sabirnice omogućuje prijenos do 2048 različitih poruka, pri čemu su adrese od 2033 do 2048 trajno fiksirane.
Količina podataka u jednoj poruci na CAN sabirnici podataka je 8 bajtova.
Blok primatelja obrađuje samo te poruke (paketi podataka), koji su pohranjeni u njegovom popisu CAN poruka primljenih na sabirnici podataka (prijemna kontrola).
Paketi podataka mogu se prenositi samo ako je CAN sabirnica podataka slobodna (tj. ako je nakon zadnjeg podatkovnog paketa uslijedio interval od 3 bita i niti jedna kontrolna jedinica ne počne slati poruku).
U tom slučaju logička razina sabirnice podataka mora biti recesivna (logično «1»).
Ako više upravljačkih jedinica počne slati poruke u isto vrijeme, tada stupa na snagu princip prioriteta, prema kojem će poruka na CAN sabirnici podataka s najvećim prioritetom biti prva poslana bez gubitka vremena ili bitova (arbitraža zahtjeva za pristup zajedničkoj podatkovnoj sabirnici).
Svaka kontrolna jedinica koja izgubi pravo arbitraže automatski će se prebaciti na primanje i ponovno pokušati poslati svoju poruku čim se CAN sabirnica podataka ponovno oslobodi.
Osim paketa podataka postoji i paket zahtjeva za određenu poruku na CAN sabirnici podataka.
U tom slučaju upravljačka jedinica, koja može dati traženi paket podataka, odgovara na ovaj zahtjev.
Format paketa podataka
U normalnom načinu prijenosa, podatkovni paketi imaju sljedeće blok konfiguracije (okviri):
Data Frame (okvir poruke) za prijenos poruka na CAN sabirnici podataka (npr.: temperatura rashladne tekućine).
Remote Frame (okvir zahtjeva) za traženje poruka na CAN podatkovnoj sabirnici od druge upravljačke jedinice.
Error Frame (okvir pogreške) sve povezane upravljačke jedinice su obaviještene da je došlo do greške i zadnja poruka na CAN podatkovnoj sabirnici nije važeća.
Protokol CAN podatkovne sabirnice podržava dva različita formata okvira poruke CAN podatkovne sabirnice koji se razlikuju samo u duljini identifikatora:
- standardni format;
- prošireni format.
DaimlerChrysler trenutno koristi samo standardni format.
Paket podataka za prijenos poruka na CAN sabirnici podataka sastoji se od sedam uzastopnih polja (pogledajte ilustraciju 9.0c):
- Start of Frame (početak malo): Označava početak poruke i sinkronizira sve module.
- Arbitration Field (id i zahtjev): Ovo polje se sastoji od identifikatora (adrese) 11 bitova i 1 bit za provjeru (Remote Transmission Request-Bit). Ovaj kontrolni bit označava paket kao podatkovni okvir (okvir poruke) ili kao daljinski okvir (okvir zahtjeva) nema podatkovnih bajtova.
- Control Field (kontrolni bitovi): Kontrolno polje (6 bita) sadrži IDE bit (Identifier Extension Bit) za prepoznavanje standardnog i proširenog formata, rezervni bit za naknadna proširenja i - u zadnja 4 bita - broj bajtova podataka ugrađenih u podatkovno polje (podatkovno polje).
- Data Field (podaci): Podatkovno polje može sadržavati 0 do 8 bajtova podataka. Za sinkronizaciju distribuiranih procesa koristi se poruka na CAN sabirnici podataka duljine 0 bajtova.
- CRC Field (kontrolno polje): CRC polje (Cyclic-Redundancy-Check Field) sadrži 16 bita i služi za kontrolno prepoznavanje grešaka tijekom prijenosa.
- ACK Field (potvrda prihvaćanja): polje ACK (Acknowledgement Field) sadrži signal potvrde za sve prijamne jedinice koje su primile poruku preko CAN sabirnice bez grešaka.
- End of Frame (kraj okvira): Označava kraj podatkovnog paketa.
- Intermission (interval): Interval između dva podatkovna paketa. Interval mora biti najmanje 3 bita. Nakon toga bilo koja upravljačka jedinica može poslati sljedeći paket podataka.
- IDLE (način odmora): Ako nijedna upravljačka jedinica ne šalje poruke, tada CAN sabirnica ostaje u stanju mirovanja do prijenosa sljedećeg paketa podataka.
Prioriteti
Kako bi se podaci obrađivali u stvarnom vremenu, mora postojati mogućnost njihovog brzog prijenosa.
Ne samo da to zahtijeva vezu visoke fizičke brzine prijenosa podataka, već također zahtijeva da zajednička CAN sabirnica bude brzo dostupna ako više upravljačkih jedinica treba slati poruke u isto vrijeme.
Kako bi se razlikovale poruke koje se prenose CAN sabirnicom podataka prema stupnju hitnosti, predviđeni su različiti prioriteti za pojedine poruke.
Vrijeme paljenja, na primjer, ima najveći prioritet, vrijednosti klizanja imaju srednji, a vanjska temperatura ima najniži prioritet.
Prioritet s kojim se poruka prenosi na CAN sabirnici određen je identifikatorom (adresa) odgovarajuću poruku.
Identifikator koji odgovara manjem binarnom broju ima veći prioritet i obrnuto.
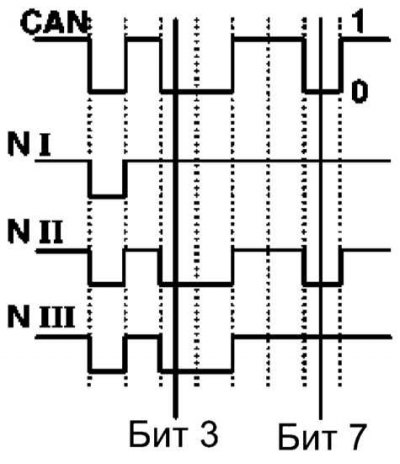
Protokol sabirnice podataka CAN temelji se na dva logička stanja: Bitovi su ili «recesivan» (logično «1»), ili «dominantan» (logično «0»). Ako dominantni bit prenosi barem jedan modul, tada se recesivni bitovi koje prenose drugi moduli prepisuju.
Primjer
Ako više upravljačkih jedinica započne prijenos podataka u isto vrijeme, tada se sukob pristupa zajedničkoj sabirnici podataka rješava pomoću «bitwise arbitraža zahtjeva za zajedničkim resursima» s odgovarajućim identifikatorima.
Prilikom prijenosa identifikacijskog polja transmiter nakon svakog bita provjerava ima li još pravo na prijenos ili neka druga upravljačka jedinica već šalje poruku višeg prioriteta na CAN sabirnici podataka.
Ako se recesivni bit koji prenosi prva odašiljačka jedinica prebriše dominantnim bitom druge odašiljačke jedinice, tada prva odašiljačka jedinica gubi pravo na prijenos (arbitraža) i postaje prijemna jedinica.
Prva upravljačka jedinica (N I) gubi arbitražu od 3. bita.
Treća upravljačka jedinica (N III) gubi arbitražu od 7. bita.
Druga upravljačka jedinica (N II) zadržava pravo pristupa CAN sabirnici podataka i može prenijeti svoju poruku.
Ostale upravljačke jedinice pokušat će prenijeti svoje poruke na CAN podatkovnu sabirnicu tek kada se ponovno oslobodi. U tom slučaju ponovno će se dodijeliti pravo prijenosa u skladu s prioritetom poruke na CAN sabirnici podataka.
Prepoznavanje grešaka
Smetnje mogu dovesti do pogrešaka u prijenosu podataka. Takve pogreške u prijenosu treba prepoznati i ispraviti. Protokol sabirnice podataka CAN razlikuje dvije razine prepoznavanja pogreške:
- mehanizama na razini podatkovnog okvira (okvir poruke);
- mehanizmi bitne razine.
Mehanizmi na razini podatkovnog okvira
Cyclic-Redundancy-Check
Na temelju poruke odaslane putem CAN podatkovne sabirnice, transmiter izračunava kontrolne bitove koji se prenose zajedno s paketom podataka u polje «CRC Field» (kontrolni zbrojevi). Prijemna jedinica ponovno izračunava ove kontrolne bitove na temelju poruke primljene preko CAN sabirnice podataka i uspoređuje ih s kontrolnim bitovima primljenim s ovom porukom.
Frame Check
Ovaj mehanizam provjerava strukturu odaslanog bloka (okvir), odnosno ponovo se provjeravaju bitna polja s danim fiksnim formatom i duljinom okvira.
Pogreške otkrivene provjerom okvira označavaju se kao pogreške formata.
Mehanizmi razine bitova
Praćenje
Svaki modul prilikom odašiljanja poruke prati logičku razinu CAN sabirnice podataka i utvrđuje razlike između poslanih i primljenih bitova. Ovo osigurava pouzdano prepoznavanje globalnih i lokalnih pogrešaka u bitovima koje se javljaju u odašiljačkoj jedinici.
Bit Stuffing
U svakom podatkovnom paketu između polja «Start of Frame» i kraj terena «CRC Field» ne smije biti više od 5 uzastopnih bitova s istim polaritetom.
Nakon svakog niza od 5 identičnih bitova, blok odašiljač dodaje jedan bit suprotnog polariteta u tok bitova.
Prijemne jedinice brišu ove bitove nakon primanja poruke na CAN sabirnici podataka.
Rješavanje problema
Ako bilo koji modul CAN podatkovne sabirnice otkrije pogrešku, prekinut će trenutni proces prijenosa podataka slanjem poruke o pogrešci. Poruka o pogrešci sastoji se od 6 dominantnih bitova.
Zahvaljujući poruci o pogrešci, sve upravljačke jedinice spojene na CAN sabirnicu podataka dobivaju obavijest o lokalnoj pogrešci koja se dogodila i sukladno tome ignoriraju prethodno poslanu poruku.
Nakon kratke pauze, sve upravljačke jedinice ponovno će moći slati poruke na CAN podatkovnoj sabirnici, pri čemu će se ponovno prva poslati poruka s najvećim prioritetom.
Upravljačka jedinica čija je poruka na CAN sabirnici podataka uzrokovala pogrešku također počinje ponovno slati svoju poruku (funkcija automatskog zahtjeva za ponavljanjem).
Vrste CAN sabirnice
Za različita kontrolna područja koriste se različite CAN sabirnice. Međusobno se razlikuju po brzini prijenosa podataka.
CAN područje brzine prijenosa podataka «motora i voznog mehanizma» (CAN-C) je 125 Kbps, a CAN sabirnica podataka «Salon» (CAN-B) zbog manjeg broja posebno hitnih poruka predviđen je za brzinu prijenosa podataka od samo 83 Kbps.
Razmjena podataka između dva sabirnička sustava odvija se putem tzv «pristupnici», tj. upravljačke jedinice spojene na obje podatkovne sabirnice.
CAN sučelje podatkovne sabirnice nalazi se u upravljačkoj jedinici elektroničke brave za paljenje (N73). Ova kontrolna jedinica također osigurava sučelje između CAN kontrolne jedinice sabirnice podataka i DLC-a (X11/4).
Prilikom zamjene, nova upravljačka jedinica mora biti kodirana pomoću dijagnostičkog alata.
Sve upravljačke jedinice CAN sabirnice podataka koriste standard «OSEK».
Svjetlovod D2B (Digital Daten-Bus) podaci primijenjeni na područje «Audio/Komunikacija/Navigacija». Optički kabel može prenijeti znatno veću količinu informacija nego sabirnica s bakrenim kabelom.
CAN C sabirnica «Motor i šasija»
Takozvani završni otpornik sabirnice podataka s otporom od 120 Ω ugrađen je sa svake strane upravljačke jedinice terminala, spojen između obje žice sabirnice podataka.
CAN sabirnica podataka u prostoru motora aktivna je samo kada je paljenje uključeno.
7 upravljačkih jedinica spojeno je na CAN-C sabirnicu.
CAN B - bus «Salon»
Neke upravljačke jedinice spojene na CAN podatkovnu sabirnicu putničkog prostora aktiviraju se bez obzira na uključeno paljenje (npr. sustav s jednom bravom).
Dakle, podatkovna sabirnica CAN putničkog prostora mora biti u funkciji i kada je kontakt isključen, što znači da se mora osigurati mogućnost prijenosa paketa podataka i kada je kontakt isključen.
Kako bi se što više smanjila potrošnja struje mirovanja, CAN podatkovna sabirnica, u nedostatku paketa podataka potrebnih za prijenos, prelazi u pasivno stanje mirovanja, te se ponovno aktivira tek pri sljedećem pristupu.
Ako je u pasivnom stanju pripravnosti CAN podatkovne sabirnice putničkog prostora, bilo koja upravljačka jedinica (npr. upravljačka jedinica s jednom bravom) prenosi poruku na CAN sabirnici podataka, prima je samo glavni modul sustava (elektronički prekidač paljenja, EZS). EZS blok pohranjuje ovu poruku u memoriju i šalje aktivacijski signal (Wake-up) na sve upravljačke jedinice spojene na CAN podatkovnu sabirnicu putničkog prostora.
Kada je aktiviran, EZS provjerava sve korisnike CAN podatkovne sabirnice i zatim šalje prethodno pohranjenu poruku.
Na CAN-B sabirnicu spojeno je 20 upravljačkih jedinica.