
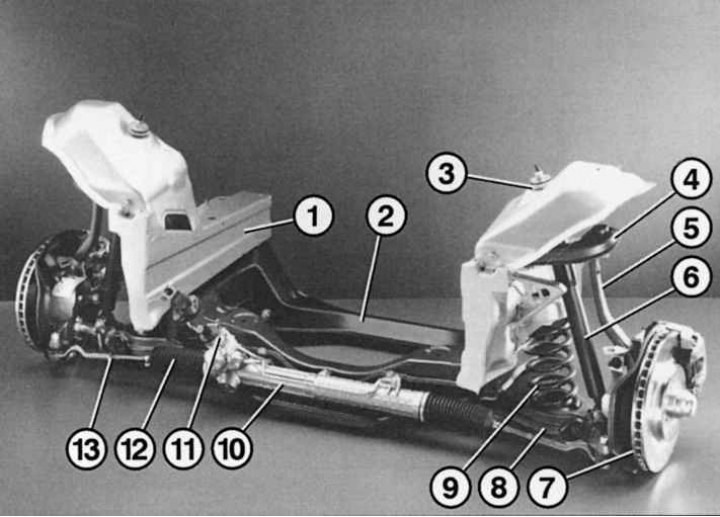
Riža. 7.1. Prednji ovjes: 1 – poluga tijela; 2 - nosiva greda; 3 – šalica amortizera; 4 - gornja poprečna poluga; 5 – rotacijska šaka; 6 - amortizer; 7 - kočioni disk s čeljusti; 8 - donja poprečna poluga; 9 - upletena opruga; 10 – kućište letve i zupčanika upravljača; 11 - osovina upravljača s zupčanikom; 12 – poklopac za zaštitu od prljavštine propuha upravljača; 13 - lijeva spona
Dizajn prednjeg ovjesa automobila Mercedes E-klase prikazan je na sl. 7.1. Korištenje modernog dizajna s dvostrukim poprečnim ramenima poboljšalo je udobnost, funkciju upravljanja ovjesom i upravljanje automobilom. Svaki prednji kotač ima neovisni ovjes za tijelo.
Prednji ovjes s dvostrukom viljuškom. Slična shema zamijenila je podupirač amortizera na prethodnom modelu. Također se koristi na modelima S i C klase. S ovom shemom, amortizer i opruga ugrađeni su odvojeno. Zahvaljujući dvostrukim kracima, amortizeri su oslobođeni funkcije vođenja prednjih kotača, što im omogućuje da bolje obavljaju svoju glavnu zadaću - prigušivanje vibracija.
Wishbones
Smjer svakog prednjeg kotača obavljaju dva (vrh i dno) trokutaste pletenice. Nadlaktica 4 (vidi sl. 7.1) povezan izravno s karoserijom preko velikog gumeno-metalnog zgloba, a donji krak je pričvršćen na nosač 2 prednjeg ovjesa.
Donji kuglasti zglob
Zavojna opruga 9 i amortizer 6 oslanjaju se na tijelo preko tzv. donjeg kuglastog zgloba, koji ima promjenjivu opružnu karakteristiku, i postaju krući kako se povećava sila prigušenja.
Amortizer
Odvojeni položaj amortizera određuje precizno ponašanje kotača pri obradi neravnina na cesti. Rezultat odvojenog položaja opruge i amortizera jasno je vidljiv u praksi. Na primjer, prilikom vožnje po ravnoj liniji ili bočnog vjetra. Mercedes E-klase ne skreće za svaki kolotrag na cesti i samo malo skreće s kursa pri iznenadnom udaru vjetra.
Računalno izračunati gumeni elementi prednjeg ovjesa s dvostrukim poprečnim ramenima (Latinska oznaka DQ) omogućuju promjenu smjera kotača samo u određenim granicama i time značajno poboljšavaju stabilnost vozila pri kočenju i skretanju. Dakle, tijekom amortizacije kutovi nagiba i prijelaza ne mijenjaju se značajno, što pozitivno utječe na karakteristiku otpora kotrljanja i trošenje gume. Geometrija ovjesa, u kombinaciji s elasto-kinematikom sustava dvostrukih poprečnih ramena, jamči neutralno ili lako podesivo upravljanje vozilom, što je neizostavan princip Mercedes-Benz dizajna šasije za aktivnu sigurnost.
Nosila
Za razliku od drugih Mercedesovih modela osobnih automobila, donja poprečna ramena i upravljački mehanizam E-klase postavljeni su na nosač prednjeg ovjesa koji je oblikovan kao okvir. Ovaj takozvani podokvir je zauzvrat pričvršćen vijcima na prednje bočne dijelove karoserije i olakšava ugradnju motora i prednjeg ovjesa prilikom sastavljanja automobila. Osim toga, povećava zaštitu putnika pri frontalnom udaru i služi za odvajanje šasije od karoserije. Dakle, zahvaljujući pomoćnom okviru, vibracije i buka tijekom kretanja manje se prenose u putnički prostor. Nosači motora i upravljača montirani su na sam podokvir.
Upravljanje zupčastom letvom
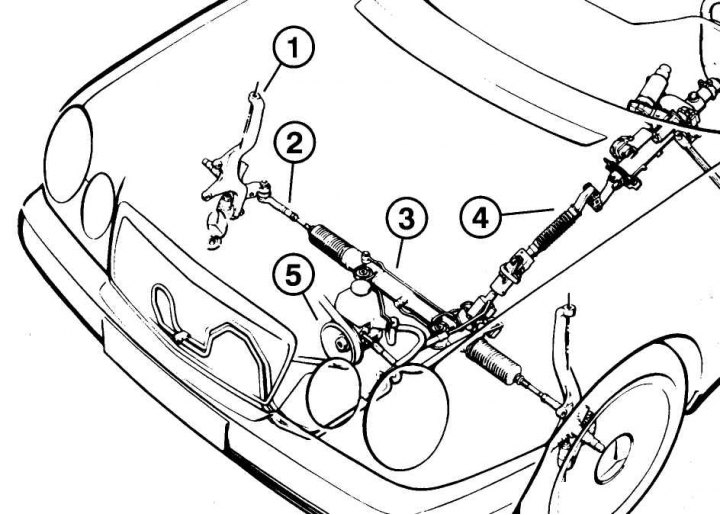
Riža. 7.2. Upravljanja: 1 – rotacijska šaka; 2 – desni upravljački gaz; 3 - kućište zupčanika; 4 - osovina upravljača (u dva dijela); 5 - pumpa hidrauličkog pojačanja
Novost u dizajnu je ugradnja donjih poluga u smjeru naprijed. Osim toga, napravljena je još jedna nadogradnja - servo upravljanje zupčanikom i zupčanikom zamijenilo je prethodnu shemu upravljanja «navojna matica», koji više nije odgovarao obećavajućem konceptu Mercedes-Benza za olakšavanje dizajna. Novi dizajn upravljača (riža. 7.2) sada nema bipoda, srednjih poluga, ploča za ukrućenje i pričvršćivača. Upravljačke poluge su spojene na upravljački mehanizam bez međuprevodnih elemenata. Dizajn tako osigurava ispravno i precizno rukovanje.
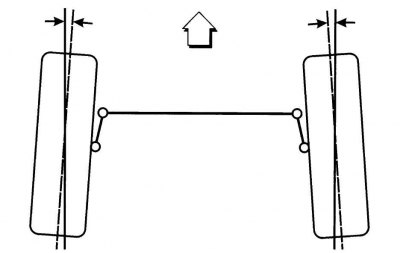
Riža. 7.3. Shematski prikaz poravnanja kotača
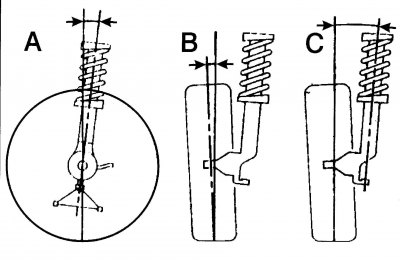
Riža. 7.4. Kutovi poravnanja kotača: A - kut uzdužnog nagiba; B - kut nagiba; C - kut poprečnog nagiba
Pojmovi geometrije ovjesa
poravnanje kotača. Upravljivi kotači su sprijeda bliže nego straga (imaju neku vrstu protukotrljanja) (riža. 7.3). Time se izjednačava sila trenja između površine ceste i kotača, koja nastoji usmjeriti lijevi kotač ulijevo, a desni udesno. Toe-in sprječava vibracije kotača i jednostrano trošenje guma. Prilikom skretanja, kotač na unutarnjem radijusu se pomiče više u smjeru skretanja kako bi podržao kretanje skretanja i više je opterećen silom skretanja od kotača na vanjskom radijusu, tako da je nožni kut obrnut (stražnji kotači se približavaju jedan drugome).
kolaps. Određuje nagib prednjih kotača u okomitoj ravnini (riža. 7.4, B). Nagib smanjuje utjecaj neravnina ceste na upravljanje, smanjuje silu na upravljaču i silu trenja kotača o kolnik.
Kut poprečnog nagiba osi rotacije kotača. Kut između osi rotacije kotača i okomice (vidi sl. 7.4, C). Ako liniju ove osi nastavimo do tla i odredimo udaljenost od nje do središnje točke dodira kotača s cestom, tada ćemo dobiti voznu bankinu. Treba biti što manji kako bi se smanjio utjecaj bočnih sila na upravljanje. Bočni kut nagiba zajedno s uzdužnim kutom nagiba utječe na to da se automobil pri okretanju kotača lagano podiže, a pri otpuštanju upravljača prednji kotači se sami vraćaju u srednji položaj.
Kut uzdužnog nagiba osi rotacije kotača. Kut između osi rotacije kotača gledano sa strane i okomice (riža. 7.4, A). Zbog kuta kotača u odnosu na prednje kotače, primjenjuje se vučna sila umjesto sile guranja. Zato kotači nastoje održati ravnu liniju.
Novi upravljač
Novi dizajn upravljača više nema bipode, srednje poluge, ploče za ukrućenje i pričvršćivače. Upravljačke poluge su spojene na upravljački mehanizam bez međuprevodnih elemenata. To ne samo da olakšava ugradnju, već i smanjuje težinu. Dizajn omogućuje ispravno i precizno rukovanje. Pričvršćivanjem upravljača na podokvir preko elastičnih elemenata značajno je smanjen prijenos neravnina na cesti na upravljač, tako da novi dizajn, uz ostale prednosti, povećava i udobnost. Budući da je upravljački mehanizam smješten u unutarnjem dijelu podokvira, Mercedesovi inženjeri razvili su upravljačku osovinu s dva križna zgloba. Oni ujednačavaju dio aksijalne pomake između upravljačkog mehanizma i osovine upravljača, a također služe za smanjenje vibracija, koje prigušuje torzijski prigušivač vibracija ugrađen u prvi zglob. Drugi križni zglob je oscilirajući zglob, koji omogućuje individualno podešavanje položaja stupa upravljača po dužini i visini, koji je također opremljen električnim pogonom.