
Абмен дадзенымі па шыне CAN
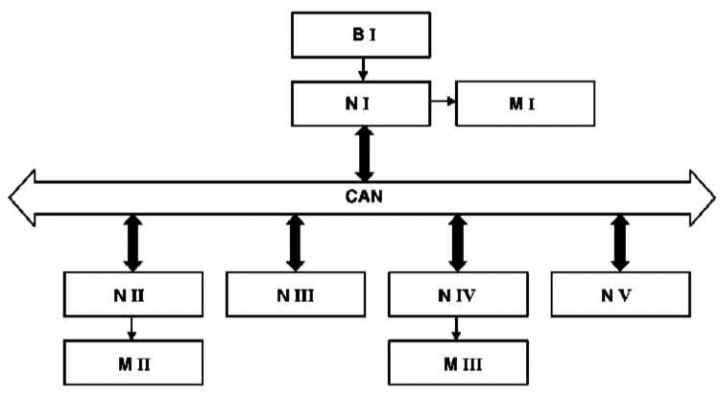
B - Датчык 1; CAN - Шына дадзеных; М - Выканаўчыя элементы I - III (сервамеханізмы); N - Блокі кіравання (кантролеры) I-V
Асноўныя звесткі
На аўтамабілі ўжытыя некалькі сеткавых шын абмену дадзенымі CAN (Controller Area Network) паміж блокамі (модулямі) кіравання розных сістэм і кантролерамі выканаўчых прылад аўтамабіля.
Асобныя блокі кіравання аб'яднаны сябар з сябрам у агульную сетку і могуць абменьвацца дадзенымі.
Шына з'яўляецца двунакіраванай, г.зн. любое падлучанае да яе прылада можа прымаць і перадаваць паведамленні.
Сігнал з адчувальнага элемента (датчыка) паступае ў найблізкі блок кіравання, які апрацоўвае яго і перадае на шыну дадзеных CAN.
Любы блок кіравання, падлучаны да шыны дадзеных CAN, можа счытваць гэты сігнал, вылічаць на яго аснове значэнне кіраўніка ўздзеяння і кіраваць выканаўчым сервамеханізмам.
Перавагі
Пры звычайным кабельным злучэнні электрычных і электронных прылад ажыццяўляецца прамое злучэнне кожнага блока кіравання са ўсімі датчыкамі і выканаўчымі элементамі, ад якіх ён атрымлівае вынікі вымярэнняў ці якімі кіруе.
Ускладненне сістэмы кіравання прыводзіць да празмернай даўжыні ці шматлікасці кабельных ліній.
У параўнанні са стандартнай кабельнай разводкай шына даных забяспечвае:
- Памяншэнне колькасці кабеляў. Правады ад датчыкаў цягнуцца толькі да бліжэйшага блоку кіравання, які пераўтворыць вымераныя значэння ў пакет дадзеных і перадае яго ў шыну CAN.
- Кіраваць выканаўчым механізмам можа любы блок кіравання, які па шыне CAN атрымлівае які адпавядае пакет дадзеных, і на яго аснове разлічвае значэнне кіраўніка ўздзеяння на сервамеханізм.
- Паляпшэнне электрамагнітнай сумяшчальнасці.
- Памяншэнне колькасці штэкерных злучэнняў і памяншэнне колькасці кантактных высноў на блоках кіравання.
- Зніжэнне вагі.
- Памяншэнне колькасці датчыкаў, т.я. сігналы аднаго датчыка (напрыклад, з датчыка тэмпературы астуджальнай вадкасці) могуць быць скарыстаны рознымі сістэмамі.
- Паляпшэнне магчымасцей дыягнаставання. Т.к. сігналы аднаго датчыка (напрыклад, сігнал хуткасці) выкарыстоўваюцца рознымі сістэмамі, то ў выпадку, калі паведамленне аб няспраўнасці выдаюць усё выкарыстоўвалыя дадзены сігнал сістэмы, няспраўным з'яўляецца, як правіла, датчык ці блок кіравання, які апрацоўвае яго сігналы. Калі ж паведамленне аб няспраўнасці паступае толькі ад адной сістэмы, хоць дадзены сігнал выкарыстоўваецца і іншымі сістэмамі, то чыннік няспраўнасці, часцей за ўсё, складзена ў апрацоўчым блоку кіравання або сервамеханізме.
- Высокая хуткасць перадачы дадзеных магчымая да 1Мбіт/з пры максімальнай даўжыні лініі 40 м. У наш час на а/м Mercedes-Benz хуткасць перадачы дадзеных складае ад 83 Кбіт/з да 500 Кбіт/з.
- Некалькі паведамленняў могуць па чарзе перадавацца па адной і той жа лініі.
Шына дадзеных CAN складаецца з двухжыльнага провада, выкананага ў выглядзе вітай пары. Да гэтай лініі падключаны ўсе прылады (блокі кіравання прыладамі).
Перадача дадзеных ажыццяўляецца з дубляваннем па абодвух правадах, прычым лагічныя ўзроўні шыны дадзеных маюць люстраное адлюстраванне (гэта значыць, калі па адным провадзе перадаецца ўзровень лагічнага нуля (0), то па іншым провадзе перадаецца ўзровень лагічнай адзінкі (1), і наадварот).
Двухправодная схема перадачы выкарыстоўваецца па двух прычынах: для выяўлення памылак і як аснова надзейнасці.
Калі пік напругі ўзнікае толькі на адным провадзе (напрыклад, з прычыны праблем з ЭМС (Электрамагнітная сумяшчальнасць)), то блокі-прымачы могуць ідэнтыфікаваць гэта як памылку і праігнараваць гэты пік напругі.
Калі ж адбудзецца кароткае замыканне ці абрыў аднаго з двух правадоў шыны дадзеных CAN, то дзякуючы інтэграванай праграмна-апаратнай сістэме надзейнасці адбудзецца пераключэнне ў рэжым працы па аднаправоднай схеме. Пашкоджаная перадаючая лінія выкарыстоўвацца не будзе.
Парадак і фармат перадаюцца і прымаюцца карыстальнікамі (абанентамі) паведамленняў вызначаны ў пратаколе абмену дадзенымі.
Істотнай адметнай прыкметай шыны дадзеных CAN у параўнанні з іншымі шыннымі сістэмамі, якія базуюцца на прынцыпе абаненцкай адрасацыі, з'яўляецца суаднесеная з паведамленнем адрасаванне.
Гэта значыць, што кожнаму паведамлення па шыне дадзеных CAN прысвойваецца яго пастаянны адрас (ідэнтыфікатар), які маркуе змест гэтага паведамлення (напрыклад: тэмпература астуджальнай вадкасці). Пратакол шыны дадзеных CAN дапускае перадачу да 2048 розных паведамленняў, прычым адрасы з 2033 па 2048 з'яўляюцца стала замацаванымі.
Аб'ём дадзеных у адным паведамленні па шыне даных CAN складае 8 байт.
Блок-прымач апрацоўвае толькі тыя паведамленні (пакеты дадзеных), якія захаваны ў яго спісе прыманых па шыне дадзеных CAN паведамленняў (кантроль прымальнасці).
Пакеты дадзеных могуць перадавацца толькі ў тым выпадку, калі шына дадзеных CAN вольная (г.зн., калі пасля апошняга пакета дадзеных рушыў услед інтэрвал у 3 біта, і ніякі з блокаў кіравання не пачынае перадаваць паведамленне).
Пры гэтым лагічны ўзровень шыны дадзеных павінен быць рэцэсіўным (лагічная «1»).
Калі некалькі блокаў кіравання адначасова пачынаюць перадаваць паведамленні, тое ўступае ў сілу прынцып прыярытэтнасці, паводле якога паведамленне па шыне дадзеных CAN з найвышэйшым прыярытэтам будзе перадавацца першым без страты часу ці бітаў (арбітраж запытаў доступу да агульнай шыны дадзеных).
Кожны блок кіравання, які губляе права арбітражу, аўтаматычна перамыкаецца на прыём і паўтарае спробу адправіць сваё паведамленне, як толькі шына дадзеных CAN зноў вызваліцца.
Акрамя пакетаў дадзеных існуе таксама пакет запыту вызначанага паведамлення па шыне дадзеных CAN.
У гэтым выпадку блок кіравання, які можа падаць запытаны пакет дадзеных, рэагуе на дадзены запыт.
Фармат пакета даных
У звычайным рэжыме перадачы пакеты дадзеных маюць наступныя канфігурацыі блокаў (фрэймы):
- Data Frame (фрэйм паведамлення) для перадачы паведамленняў па шыне дадзеных CAN (напр.: тэмпература астуджальнай вадкасці).
- Remote Frame (фрэйм запыту) для запыту паведамленняў па шыне дадзеных CAN ад іншага блока кіравання.
- Error Frame (фрэйм памылкі) усе падлучаныя блокі кіравання паведамляюцца аб тым, што ўзнікла памылка і апошняе паведамленне па шыне дадзеных CAN з'яўляецца несапраўдным.
Пратакол шыны дадзеных CAN падтрымлівае два розных фармату фрэймаў паведамлення па шыне дадзеных CAN, якія адрозніваюцца толькі па даўжыні ідэнтыфікатара:
- стандартны фармат;
- пашыраны фармат.
У наш час DaimlerChrysler выкарыстоўвае толькі стандартны фармат.
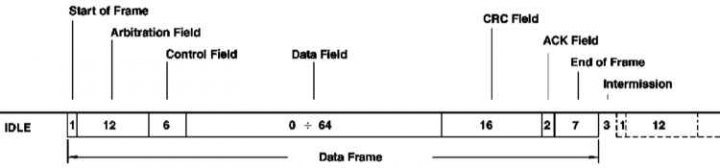
Пакет дадзеных для перадачы паведамленняў па шыне дадзеных CAN складаецца з сямі паслядоўных палёў:
- Start of Frame (стартавы біт): Маркіруе пачатак паведамлення і сінхранізуе ўсе модулі.
- Arbitration Field (ідэнтыфікатар і запыт): Гэтае поле складаецца з ідэнтыфікатара (адрасы) у 11 біт і 1 кантрольнага біта (Remote Transmission Request-Bit). Гэты кантрольны біт маркіруе пакет як Data Frame (фрэйм паведамлення) ці як Remote Frame (фрэйм запыту) без байтаў дадзеных.
- Control Field (кіраўнікі біты): Поле кіравання (6 біт) змяшчае IDE-біт (Identifier Extension Bit) для распазнання стандартнага і пашыранага фармату, рэзервовы біт для наступных пашырэнняў і - у апошніх 4 бітах - колькасць байтаў дадзеных, закладзеных у Data Field (поле дадзеных).
- Data Field (дадзеныя): Поле дадзеных можа змяшчаць ад 0 да 8 байт дадзеных. Паведамленне па шыне дадзеных CAN даўжынёй 0 байт выкарыстоўваецца для сінхранізацыі размеркаваных працэсаў.
- CRC Field (кантрольнае поле): Поле CRC (Cyclic-Redundancy-Check Field) змяшчае 16 біт і служыць для кантрольнага распазнання памылак пры перадачы.
- ACK Field (пацвярджэнне прыёму): Поле ACK (Acknowledgement Field) змяшчае сігнал пацверджання прыёму ўсіх блокаў-прымачоў, якія атрымалі паведамленне па шыне CAN без памылак.
- End of Frame (канец фрэйма): Маркіруе канец пакета даных.
- Intermission (інтэрвал): Інтэрвал паміж двума пакетамі даных. Інтэрвал павінен складаць не менш за 3 біты. Пасля гэтага любы блок кіравання можа перадаваць наступны пакет даных.
- IDLE (рэжым спакою): Калі ні адзін блок кіравання не перадае паведамленняў, то шына CAN застаецца ў рэжыме спакою да перадачы наступнага пакета дадзеных.
Прыярытэты
Для апрацоўкі дадзеных у рэжыме рэальнага часу павінна быць забяспечана магчымасць іх хуткай перадачы.
Гэта мяркуе не толькі наяўнасць лініі з высокай фізічнай хуткасцю перадачы дадзеных, але і патрабуе таксама аператыўнага падавання доступу да агульнай шыны CAN, калі некалькім блокам кіравання неабходна адначасова перадаць паведамленні.
З мэтай размежавання перадаюцца па шыне дадзеных CAN паведамленняў па ступені тэрміновасці, для асобных паведамленняў прадугледжаны розныя прыярытэты.
Кут апярэджання запальвання, напрыклад, мае вышэйшы прыярытэт, значэнні прабуксоўкі - сярэдні, а тэмпература вонкавага паветра - найнізкі прыярытэт.
Прыярытэт, з якім паведамленне перадаецца па шыне CAN, вызначаецца ідэнтыфікатарам (адрасам) адпаведнага паведамлення.
Ідэнтыфікатар, які адпавядае меншай двайковай колькасці, мае больш высокі прыярытэт, і наадварот.
Пратакол шыны дадзеных CAN грунтуецца на двух лагічных станах: Біты з'яўляюцца ці «рэцэсіўнымі» (лагічная «1»), або «дамінантнымі» (лагічны «0»). Калі дамінантны біт перадаецца прынамсі адным модулем, то рецессивные біты, якія перадаюцца іншымі модулямі, перазапісваюцца.
Прыклад
Калі некалькі блокаў кіравання адначасова пачынаюць перадачу дадзеных, то канфлікт доступу да агульнай шыны дадзеных дазваляецца з дапамогай «пабітавага арбітражу запытаў агульнага рэсурсу» з дапамогай адпаведных ідэнтыфікатараў.
Пры перадачы поля ідэнтыфікатара блок-перадатчык пасля кожнага біта правярае, ці валодае ён яшчэ правам перадачы, ці ўжо іншы блок кіравання перадае па шыне дадзеных CAN паведамленне з больш высокім прыярытэтам.
Калі які перадаецца першым блокам-перадатчыкам рэцэсіўны біт перазапісваецца дамінантным бітам іншага блока-перадатчыка, то першы блок-перадатчык губляе сваё права перадачы (арбітраж) і становіцца блокам-прымачом.
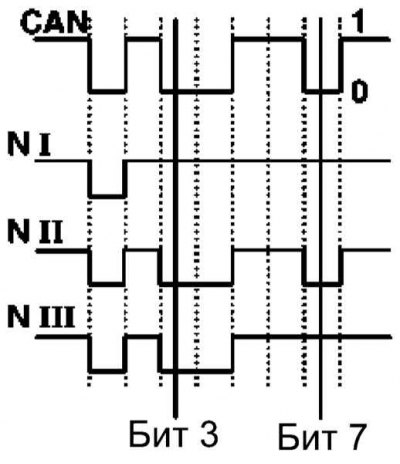
Першы блок кіравання (N I) губляе арбітраж з 3-га біта.
Трэці блок кіравання (N III) губляе арбітраж з 7-га біта.
Другі блок кіравання (N II) захоўвае права доступу да шыны даных CAN і можа перадаваць сваё паведамленне.
Іншыя блокі кіравання паспрабуюць перадаць свае паведамленні па шыне даных CAN толькі пасля таго, як яна зноў вызваліцца. Пры гэтым права перадачы зноў будзе давацца ў адпаведнасці з прыярытэтнасцю паведамлення па шыне дадзеных CAN.
Распазнаванне памылак
Перашкоды могуць прыводзіць да памылак у перадачы даных. Такія, якія ўзнікаюць пры перадачы, памылкі варта распазнаваць і ўхіляць.
Пратакол шыны дадзеных CAN адрознівае два ўзроўні распазнання памылак:
- механізмы на ўзроўні Data Frame (фрэйм паведамлення);
- механізмы на ўзроўні бітаў.
Механізмы на ўзроўні Data Frame
Cyclic-Redundancy-Check
На аснове перадаецца па шыне дадзеных CAN паведамлення блок-перадатчык разлічвае кантрольныя біты, якія перадаюцца разам з пакетам дадзеных у поле «CRC Field» (кантрольныя сумы). Блок-прымач зноўку вылічае гэтыя кантрольныя біты на аснове прынятага па шыне дадзеных CAN паведамлення і параўноўвае іх з кантрольнымі бітамі, атрыманымі разам з гэтым паведамленнем.
Frame Check
Гэты механізм правярае структуру перадаецца блока (фрэйма), гэта значыць пераправяраць бітавыя палі з зададзеным фіксаваным фарматам і даўжыня фрэйма.
Распазнаныя функцыяй Frame Check памылкі маркіруюцца як памылкі фармату.
Механізмы на ўзроўні бітаў
Маніторынг
Кожны модуль пры перадачы паведамлення адсочвае лагічны ўзровень шыны дадзеных CAN і вызначае пры гэтым адрозненні паміж перададзеным і прынятым бітам. Дзякуючы гэтаму забяспечваецца надзейнае распазнанне глабальных і якія ўзнікаюць у блоку-перадатчыку лакальных памылак па бітах.
Bit Stuffing
У кожным пакеце дадзеных паміж полем «Start of Frame» і канцом поля «CRC Field» павінна быць не больш за 5 наступных сябар за сябрам бітаў з аднолькавай палярнасцю.
Пасля кожнай паслядоўнасці з 5 аднолькавых бітаў блок-перадатчык дадае ў струмень бітаў адзін біт з процілеглай палярнасцю.
Блокі-прымачы выдаляюць гэтыя біты пасля прыёму паведамлення па шыне дадзеных CAN.
Устараненне памылак
Калі які-небудзь модуль шыны дадзеных CAN распазнае памылку, то ён перарывае бягучы працэс перадачы дадзеных, адпраўляючы паведамленне аб памылцы. Паведамленне пра памылку складаецца з 6 дамінантных бітаў.
Дзякуючы паведамленню пра памылку ўсе падлучаныя да шыны дадзеных CAN блокі кіравання апавяшчаюцца аб узніклай лакальнай памылцы і адпаведна ігнаруюць перададзенае да гэтага паведамленне.
Пасля кароткай паўзы ўсе блокі кіравання зноў змогуць перадаваць паведамленні па шыне даных CAN, прычым першым зноў будзе адпраўлена паведамленне з найвышэйшым прыярытэтам.
Блок кіравання, чыё паведамленне па шыне дадзеных CAN абумовіла ўзнікненне памылкі, таксама пачынае паўторную перадачу свайго паведамлення (функцыя Automatic Repeat Request).
Тыпы шын CAN
Для розных абласцей кіравання прымяняюцца розныя шыны CAN. Яны адрозніваюцца сябар ад сябра хуткасцю перадачы дадзеных.
Хуткасць перадачы па шыне дадзеных CAN вобласці «рухавік і хадавая частка» (CAN-C) складае 125 Кбіт/з, а шына дадзеных CAN «Салон» (CAN-B) з прычыны меншай колькасці асабліва тэрміновых паведамленняў разлічана на хуткасць перадачы даных толькі 83 Кбіт/с.
Абмен дадзенымі паміж дзвюма шыннымі сістэмамі ажыццяўляецца праз так званыя «міжсеткавыя шлюзы», г.зн. блокі кіравання, падлучаныя да абедзвюх шын дадзеных.
Оптавалакновая шына D2B (Digital Daten-Bus) дадзеных прыменена для вобласці «Аўдыё/камунікацыі/навігацыя». Оптавалакновы кабель можа перадаваць істотна большы аб'ём інфармацыі, чым шына з медным кабелем.
CAN C - шына «Рухавік і хадавая частка»
У канцавым блоку кіравання з кожнага боку ўсталяваны так званы які ўзгадняе рэзістар шыны дадзеных з супрацівам 120 Ом, падлучаны паміж абодвума правадамі шыны дадзеных.
Шына дадзеных CAN рухальнага адсека актываваная толькі пры ўключаным запальванні.
Да шыны CAN-З падлучана 7 блокаў кіравання.
CAN B - шына «Салон»
Некаторыя блокі кіравання, падлучаныя да шыны дадзеных CAN салона, актывуюцца незалежна ад уключэння запальвання (напрыклад: сістэма адзінага замка).
Таму шына дадзеных CAN салона павінна знаходзіцца ў рэжыме функцыянальнай гатоўнасці нават пры выключаным запальванні, гэта значыць, што магчымасць перадачы пакетаў дадзеных павінна быць забяспечана нават пры выключаным запальванні.
З мэтай максімальна магчымага зніжэння спажыванага току спакою, шына дадзеных CAN, пры адсутнасці неабходных да перадачы пакетаў дадзеных, пераходзіць у рэжым пасіўнага чакання, і актывуецца зноў толькі пры наступным доступе да яе.
Калі ў рэжыме пасіўнага чакання шыны дадзеных CAN салона які-небудзь блок кіравання (напрыклад, блок кіравання адзінага замка) перадае паведамленне па шыне дадзеных CAN, тое яго прымае толькі галоўны сістэмны модуль (электронны замак запальвання, EZS). Блок EZS захоўвае гэтае паведамленне ў памяці і пасылае сігнал актывацыі (Wake-up) на ўсе блокі кіравання, падлучаныя да шыны дадзеных CAN салона.
Пры актывацыі, EZS правярае наяўнасць усіх карыстачоў шыны дадзеных CAN, пасля чаго перадае захаванае да гэтага ў памяці паведамленне.
Да шыны CAN-У падлучана 20 блокаў кіравання.
Элементы сеткі абмену дадзенымі (CAN)
| CAN B (Салон) | |
| К1 | Пярэдні блок рэгістрацыі і кіравання са скрынкай засцерагальнікаў і рэле (SAM/SRB-V) |
| К2 | Задні блок рэгістрацыі і кіравання са скрынкай засцерагальнікаў і рэле (SAM/SRB-H) |
| К3 | Блок кіравання левага сядзення (SSG) |
| К4 | Блок кіравання правага сядзення (SSG) |
| К5 | Блок кіравання пярэдняй левай дзверы (TSG) |
| К6 | Блок кіравання пярэдняй правай дзверы (TSG) |
| К7 | Блок кіравання задняй левай дзверы (TSG) |
| К8 | Блок кіравання задняй правай дзверы (TSG) |
| К9 | Блок кіравання даху (DBE) |
| К10 | Верхняе поле кіравання (OBF) |
| К11 | Ніжняе поле кіравання (UBF) |
| К12 | Электронны стартавы выключальнік запальвання (EZS) |
| К13 | Прыборная дошка (KI) |
| К14 | Сістэма COMMAND/аўдыё 10/аўдыё 30/аўдыё 30 APS |
| К15 | Сістэма Parktronic (PTS) |
| К16 | Прыбор счэпнай прылады прычэпа (AAG) |
| К17 | Блок шматфункцыянальнага кіравання для спецыяльных мадэляў (MSS) |
| К18 | Стаянкавы апал |
| К19 | Ацяпляльнік (KKLA/BKLA – SA) |
| К20 | Размеркавальнік CAN-B RBA правы |
| К21 | Размеркавальнік CAN-B RBA левы |
| К22 | Размеркавальнік CAN-B Cockpit |
| К23 | Падушкі бяспекі з убудаванай сістэмай выкліку ARMINCA |
| CAN З (Прывад і хадавая частка) | |
| К12 | Выключальнік запальвання (EZS) |
| К13 | Прыборная дошка (KI) |
| К24 | Электроннае кіраванне каробкі перадач (EGS або KGS) |
| К25 | Блок кіравання рухавіка (MSG) |
| К26 | Электронны блок селектара перадач (EMW) |
| К27 | Размеркавальнік CAN Клас-C RBA левы |
| К28 | Электронная супрацьзаносная сістэма (ESP) |
| Ня ўключаныя ў сетку SG | |
| К29 | Аўтаматычнае рэгуляванне далёкасці святла (ALWR) |
| К30 | TV-цюнэр |
Элементы, падлучаныя да оптавалакновай шыны D2B
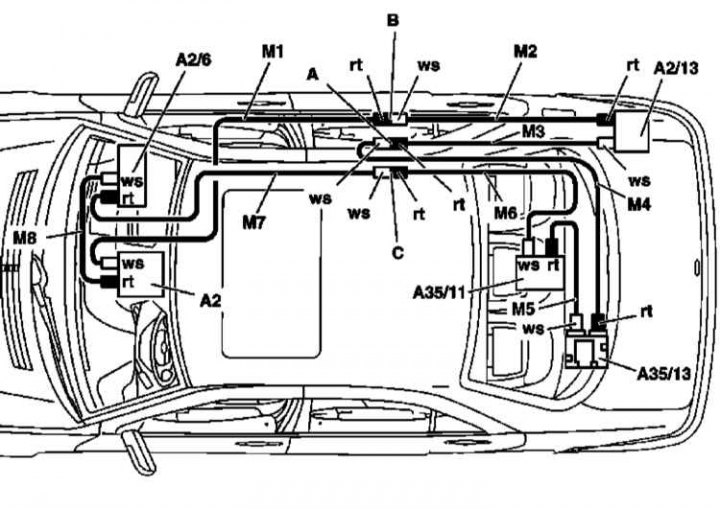
| D2B (Аўдыё/Сувязь/Навігацыя) | |
| Оптавалакновы кабель | |
| К14 | COMMAND/аўдыё 10/аўдыё 30/аўдыё 30 APS |
| К31 | Тэлефонная сістэма (MINNA, аварыйны выклік) |
| К32 | Прылада галасавога кіравання Linguatronic (SBS) |
| К33 | Кантролер мабільнага тэлефона (інтэрфейс) |
| К34 | Узмацняльнік гуку |
| К35 | CD-чэйнджар |
| Паказаны не ўсе | |
| A2 | Радыёпрымач або магнітола |
| A2/6 | CD чэйнджар |
| A40/3 | Дысплей і блок кіравання функцыянавання сістэмы COMAND |
| A2/13 | Узмацняльнік гуку |
| A35/11 | Блок кіравання сістэмы галасавога кіравання |
| A59/1 | Інтэрфейс D2B для мабільнага/убудаванага тэлефона |
| A35 | Прыёмаперадатчык сотавага тэлефона (CTEL) /сістэмы аварыйнага выкліку TELE AID |
| A35/8 | Блок кіравання TELE AID |
| A, B, C | Злучэнні |
| M1 | Оптавалакновы кабель 1 |
| M2 | Оптавалакновы кабель 2 |
| M3 | Оптавалакновы кабель 3 |
| M4 | Оптавалакновы кабель 4 |
| M5 | Оптавалакновы кабель 5 |
| M6 | Оптавалакновы кабель 6 |
| M7 | Оптавалакновы кабель 7 |
| ws | Белая ўстаўка |
| rt | Чырвоная ўстаўка |